
The basic settings for the control are selected and parameterized using the "Motor control setup" dialog box. This dialog box aids navigation to the basic settings, various controllers and the control mode.
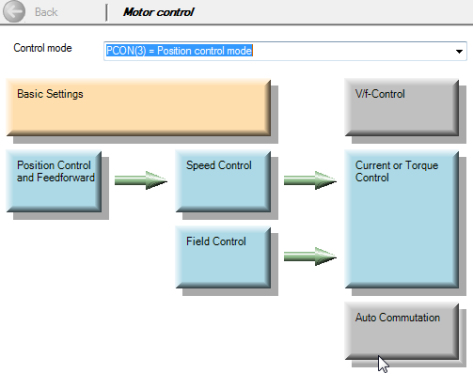
Bild: Motor control setup dialog box

|
ATTENTION: Parameter P 0300 CON_CFG_Con specifies the control mode with which the drive is to be run. This parameter takes effect online. Uncontrolled online switching can cause an extreme jerk, a very high speed or an overcurrent, which may cause damage to the system. |
Click on the "Basic settings" button opens the wizard to determine the mass inertia, the rigidity wizard, as well as the speed and position controllers.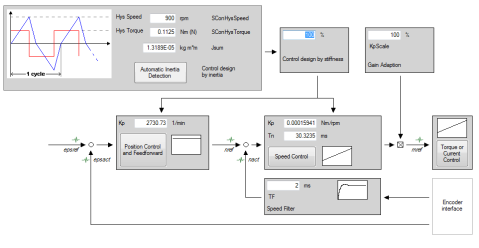
Bild: Motor control basic setting
If the mass inertia value is not known, the wizard can be used to determine it.Determining the mass inertia.htm.
|
|
ATTENTION: While the mass inertia is being determined the motor shaft executes rotary movements. There is a risk that the plant and the motor may be destroyed. |
By setting the rigidity the settings of the speed and position control with pre-control are automatically determined. In the wizard the rigidity is indicated as a percentage. A setting < 100% reduces the dynamism of the controller setting (such as for a toothed belt drive).
A setting > 100% increases the dynamism of the controller setting (low play and elasticity). The speed controller gain is scaled separately with the percentage value of KP-Scale.
The control attenuation is influenced by way of the speed filter.
Useful settings are:
|
|
ATTENTION: After a power-off the speed and position control settings remain stored. The percentage value of the rigidity is reset to 100% however. |
Copyright © LTi DRiVES GmbH, Januar 2013, ID-Nr.: 0842.26B.1-00 DE